Antecedentes del proyecto: Unidad de robot de soldadura de tapa de pozo de acero inoxidable (aplicada en uno de los famosos fabricantes de pozos de la India)
Requerimiento del cliente:
1. Use un robot para reemplazar la mano de obra para soldar.Carga y descarga manual de producto.Fijación única del producto en el accesorio.
2. Material de la pieza de trabajo: hierro acero, espesor de pared: 0,8-1,2 mm;Tamaño: 300x300mm o 600x600mm
3. La pieza de trabajo debe soldarse alternativamente en la parte delantera y trasera y solicitar que se reduzca la deformación.
4. La tapa del pozo frontal y la tapa del pozo posterior se soldarán en un robot separado.Acepte soldar la tapa del pozo en varios pasos.
Soluciones:
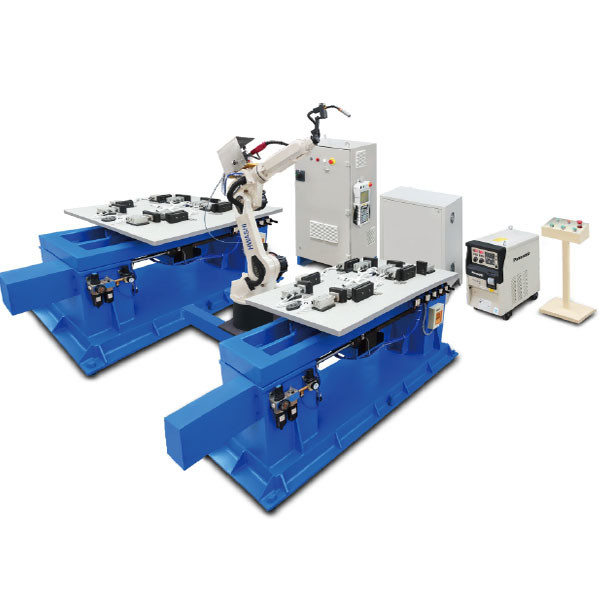
1. El sistema completo de robot de soldadura incluye 2 juegos de robot HS-R6-08 de 1,4 m de longitud de brazo, 2 juegos de máquina de soldadura MIG 350A, 2 juegos de pistola de soldadura anticolisión automática, 4 juegos de posicionador de rotación vertical de un eje, 2 juegos de limpiador de pistola de soldadura y 4 juegos de accesorios de soldadura, etc.
2. Para garantizar la estabilidad y consistencia de la calidad de la soldadura, sugerimos equiparla con un dispositivo limpiador de pistolas de soldar.
3. La soldadura automática es realizada por el robot soldador MIG de seis ejes.Los cilindros o abrazaderas rápidas se utilizan para fijar la posición del producto con el principio de palanca para garantizar los requisitos de posicionamiento de la soldadura automática del robot, para garantizar que se pueda soldar a cada parte del producto.De acuerdo con los requisitos de eficiencia de producción, se diseñaron dos conjuntos de posicionadores de un eje, uno para cargar y descargar la pieza de trabajo, uno para soldar.
Flujo de trabajo:
1) Carga manual de la pieza de trabajo al accesorio en el posicionador de la Estación 1;
2) Comience a soldar;
3) Los robots y las máquinas soldadoras soldarán la pieza de trabajo de acuerdo con el programa de preajuste;
4) Soldadura completada;
5) Mientras se suelda la estación 1, la estación 2 carga y descarga la pieza de trabajo de forma sincrónica.
6) Ciclo de trabajo
Efecto de aplicación
1. El diseño del posicionador de doble estación puede realizar una soldadura continua de larga duración, la eficiencia de la soldadura y la calidad de la soldadura han mejorado significativamente;
2. El posicionador realiza la sujeción de la pieza de trabajo al mismo tiempo y realiza automáticamente la soldadura alterna de las cuatro esquinas del producto, la deformación se controla de manera efectiva.
3. Esta máquina puede lograr una soldadura automática con material de carga manual.También puede mejorar la calidad de soldadura y la eficiencia de soldadura.Además, puede reducir el costo de producción.Se ha resuelto el problema de la calidad inestable y la baja eficiencia de producción causada por la operación manual pura.
4. El robot reemplaza la soldadura manual.La industria de la soldadura es una industria de alto riesgo, las altas temperaturas, la luz del arco y el humo de soldadura tienen un cierto impacto en la salud física y mental de los trabajadores;
5. Es una tendencia inevitable usar robots para reemplazar los robots de soldadura en soldadura, que no solo es la promoción del mercado, sino también el requisito de actualización tecnológica.

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!